2026年4月30日,由智元机器人主办、在全球机器人领域顶级学术盛会ICRA 2026框架下举办的AGIBOT WORLD CHALLENGE@ICRA 2026正式完成评选。在World Model(WM)赛道中,来自全球多个国家及地区的336支顶尖团队经过两个月角逐,最终决出10支优胜战队。我所物理智能团队的世界模型PAI-WM荣获亚军,并在衡量物理环境理解能力的核心指标——“场景一致性”得分上,以显著优势夺得第一。
ICRA(国际机器人与自动化大会)自1984年创办以来,始终引领机器人技术创新,每届吸引超5000名全球顶尖学者、工程师及企业领袖参与。本届大赛依托ICRA 2026与智元业界领先的全栈开发生态举办,是具身智能领域兼具学术公信力、产业标杆意义与全球影响力的顶级赛事。
本次大赛的World Model赛道采用线上竞赛形式,依托智元自研的EWMBench(Embodied World Model Benchmark)评测基准,参赛者基于AGIBOT WORLD开源数据集训练模型,在给定机器人动作序列与初始传感器图像的条件下,预测其在任务执行过程中视觉视角的演变。相比主流视频生成基准,EWMBench更关注物理世界的具身交互理解,在与人类主观判断一致性上表现更优。评测聚焦Action-conditioned World Model细分赛道,从图像质量、场景一致性、轨迹遵循度三个维度提供稳定可靠的性能评估。
赛制采用无人工全自动评测、实时榜单更新、指标盲盒与每日提测限制,构建严苛防hack的公平环境。区别于依赖仿真数据的基准,赛道依托AGIBOT WORLD百万真机数据集构建训练集,测试集中包含空抓、掉落等不完美轨迹,考察模型在分布外场景下对动作信号的跟随能力及物理属性模拟能力,更贴近世界模型的真实使用场景。
本届World Model赛道竞争激烈程度空前。评测数据显示,共有超过100支队伍的成绩超越基线模型,充分体现了全球研究团队在具身世界模型领域的整体技术水准已跃升至新高度。依托中国科学院工业人工智能研究所自有算力,物理智能团队提出的PAI-WM模型获得第二名,并获得“场景一致性”得分第一名。Top10榜单中汇聚了中国科学院自动化所、高德地图、中国科技大学、中国科学院计算所、重庆大学、天津大学、中国科学院大学、阿里巴巴等顶尖科研机构、高校与AI企业的强劲团队。
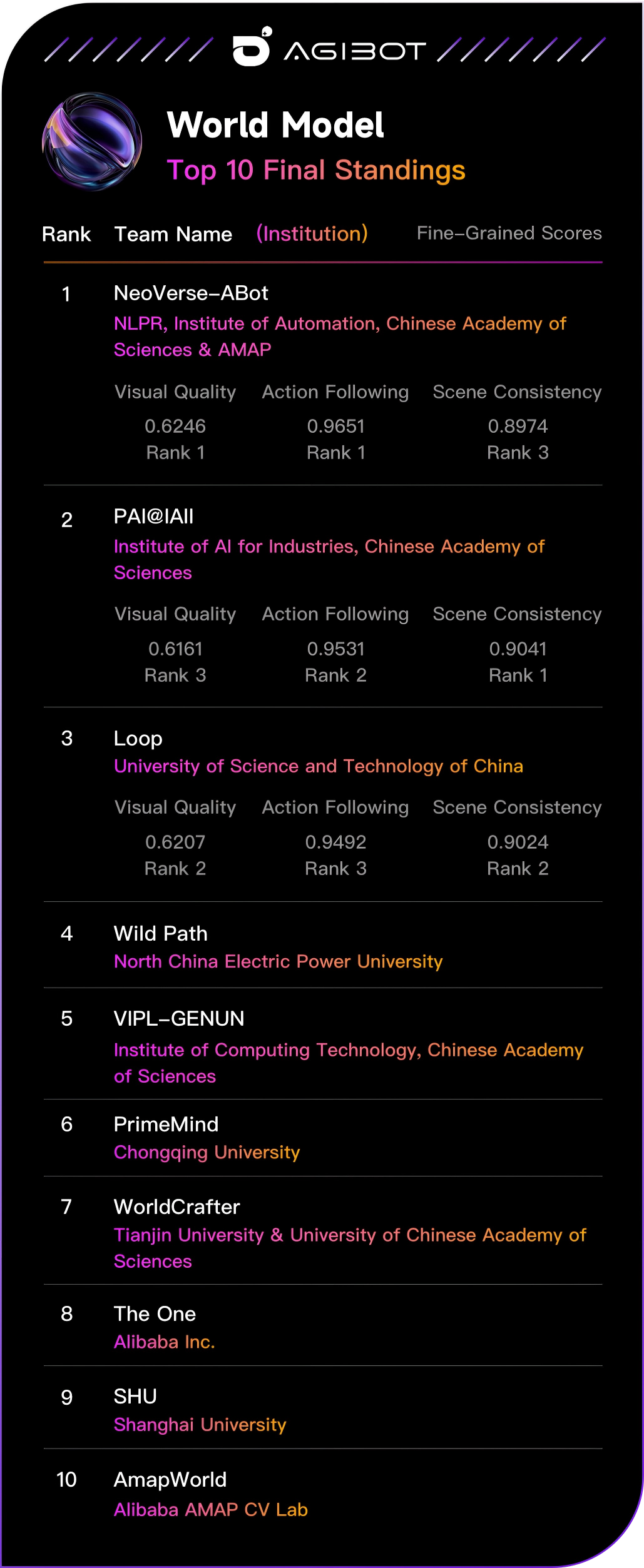
世界模型赛道排名前十的参赛队伍
PAI-WM以“几何先验驱动 + 多视角时空联合建模”为核心设计思路,在主干视频生成网络中引入多视角注意力机制,让模型在生成每一帧时都能跨视角对齐同一物理场景的几何与外观信息;同时通过三维基础模型DepthAnything3为模型注入强大的空间一致性先验,将真实世界的深度结构、表面几何与遮挡关系作为显式约束嵌入生成过程,使PAI-WM能够在长时序、复杂交互场景下保持稳定一致的物体结构——这正是其能够在场景一致性单项指标上一马当先的关键所在,也充分彰显了团队对具身场景中物理规律与交互逻辑的深层理解。场景一致性是世界模型从“能生成”迈向“能预测、能交互、能辅助决策”的重要基石,此次在该指标上取得最优成绩,得益于团队将三维几何理解、物理仿真经验与前沿生成模型相结合的系统性方案。



PAI-WM世界模型在多物体交互场景中展示了出色的场景一致性



PAI-WM世界模型在涉及刚体和软体的场景中展示出物理理解能力
附件下载: